引言:自动驾驶时代的“超级导航员”
自动驾驶技术正以前所未有的速度重塑交通出行的未来。在这一复杂系统中,高精度地图扮演着不可或缺的“超级导航员”角色。它不再仅仅是传统导航中的路径指引,而是集成了厘米级精度、丰富语义信息和实时动态更新的三维数字地图。而这一切的实现,离不开背后庞大、高效且智能的互联网数据服务的强力支撑。本文将深入剖析高精度地图的核心技术构成,并探讨其与互联网数据服务如何深度协同,共同驱动自动驾驶安全落地。
一、 自动驾驶高精度地图:超越传统导航的“上帝视角”
高精度地图是自动驾驶车辆的感知延伸和决策基石,其核心特征与技术层次包括:
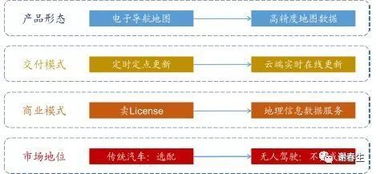
- 超高精度与丰富图层:
- 绝对精度:达到厘米级(通常10-20厘米),远超米级精度的传统地图。这依赖于高精度GNSS(全球导航卫星系统)、惯性导航系统(INS)和激光雷达(LiDAR)等多传感器融合采集。
- 多层次信息模型:包含多个逻辑图层:
- 基础图层:精确的道路几何形状(车道线、曲率、坡度、高程)。
- 语义图层:交通标志、信号灯、路缘石、护栏等静态交通要素的属性与规则。
- 动态图层:实时交通流、事故、天气、临时施工等动态信息。
- 关键技术环节:
- 数据采集:采用专业测绘车(搭载激光雷达、摄像头、GNSS/IMU)进行“众包采集”或“专业采集”相结合的模式。
- 自动化处理与制图:运用计算机视觉(CV)、点云处理与机器学习(ML)算法,从海量原始数据中自动化提取、识别和矢量化道路要素,大幅提升生产效率。
- 高精定位:车辆通过将自身传感器(摄像头、激光雷达)的实时感知结果与高精度地图进行匹配(地图匹配定位),实现在复杂环境下的厘米级自我定位,尤其在GNSS信号丢失时(如隧道、城市峡谷)至关重要。
二、 互联网数据服务:高精度地图的“生命线”与“智慧脑”
高精度地图从静态数据产品演变为动态数据服务的核心,依赖于强大的互联网数据服务体系。这一体系主要提供三大核心能力:
- 众包数据汇聚与更新:
- 庞大的量产车或特定车队,在行驶过程中通过车载传感器(摄像头、GPS)成为“移动采集器”,持续上传道路变化数据(如新增障碍物、车道线磨损、新设标志)。
- 互联网服务平台对这些海量、碎片化的众包数据进行接收、清洗、融合与分析,快速识别变化点,触发地图的增量更新。这解决了传统测绘更新周期长、成本高的痛点,实现了地图的“鲜活性”。
- 动态信息融合与分发:
- 平台整合来自交通管理部门、路侧单元(RSU)、浮动车数据、气象服务等多源的实时动态信息,并与高精度地图的静态框架进行融合。
- 通过低延迟的云服务,将融合后的动态图层(如前方拥堵、突发事故、信号灯相位)实时推送给自动驾驶车辆,赋能其进行更优的路径规划和行为决策。
- 云端协同计算与仿真:
- 云端地图:将部分计算密集型的地图数据(如复杂环境的预测模型)放在云端,车辆按需调用,减轻车端算力与存储压力。
- 仿真测试:基于高精度地图构建高度逼真的虚拟驾驶环境,为自动驾驶算法的训练、测试与验证提供无限场景,加速技术迭代。
三、 技术融合与产业挑战
高精度地图技术与互联网数据服务的深度融合,正催生“高精地图即服务”(HD Map as a Service)的新模式。这一进程也面临诸多挑战:
- 技术挑战:多源异构数据的实时对齐、融合与质量控制;众包数据的安全性与可信度验证;满足车规级要求的超低延迟服务。
- 合规与安全挑战:地理信息安全法规对数据采集、存储和传输的严格限制;众包数据涉及的隐私保护;云端服务的网络安全。
- 商业与标准化挑战:高昂的采集与维护成本与商业模式的平衡;行业数据格式与接口标准尚未完全统一,影响互联互通和生态建设。
结论:通向未来智慧交通的共生之路
自动驾驶高精度地图已从单一的静态数据产品,演进为一个由“专业采集+众包更新”、“云端服务+车端应用”构成的动态、智能的数据生态系统。互联网数据服务作为这个系统的循环系统和神经中枢,为其注入了实时性、可扩展性和智能化。随着5G/V2X通信、边缘计算和人工智能技术的进一步成熟,高精度地图与互联网数据服务的结合将更加紧密,实现“感知-决策-控制-地图更新”的全链路实时闭环,最终成为支撑全天候、全场景自动驾驶,乃至整个智慧城市交通管理的核心数字基础设施。只有攻克技术、法规与商业化的多重挑战,这条共生之路才能引领我们安全、高效地驶向自动驾驶的未来。